François Bailly
I am a research scientist at INRIA inside the Camin team. I work on human motion analysis using advanced robotics and numerical optimization tools, with neuroprostheses control as main target application.
Bio: From 2019 to 2021, I was a postdoc at Université de Montréal, working with Mickael Begon on biomechanical motion optimization. In 2018, I obtained my PhD in the Gepetto team at LAAS-CNRS supervised by Philippe Souères and Bruno Watier. In 2015, I graduated from École Normale Supérieure Paris-Saclay in Computer Science and Applied Mathematics.
On-going projects: In 2023, I have been awarded an ANR JCJC grant for the B-IRD project, on fast and reliable biomechanical methods dedicated to assistive technologies. Since 2023 I am part of the european EIC Pathfinder AI-HAND project led by INRIA on implanted neuroprosthese for hand movement restoration. Since 2022 I am part of the FLAG-ERA JCT 2021 Rescuegraph project led by UAB on functional stimulation system using graphene-based nerve electrodes.
For any inquiries, feel free to reach out to me via mail!

Publications
Eve Charbonneau, Fran{\c{c}}ois Bailly, Micka{\"e}l Begon
Sports biomechanics, 2023
Project Page /
@InProceedings{charbonneau2023optimal,
author = {Eve Charbonneau and Fran{\c{c}}ois Bailly and Micka{\"e}l Begon},
title = {Optimal forward twisting pike somersault without self-collision},
journal = {Sports biomechanics},
year = {2023},
}
Andr{\'e} Venne, Fran{\c{c}}ois Bailly, Eve Charbonneau, Jennifer Dowling-Medley, Micka{\"e}l Begon
Sports biomechanics, 2023
Project Page /
@InProceedings{venne2023optimal,
author = {Andr{\'e} Venne and Fran{\c{c}}ois Bailly and Eve Charbonneau and Jennifer Dowling-Medley and Micka{\"e}l Begon},
title = {Optimal estimation of complex aerial movements using dynamic optimisation},
journal = {Sports biomechanics},
year = {2023},
}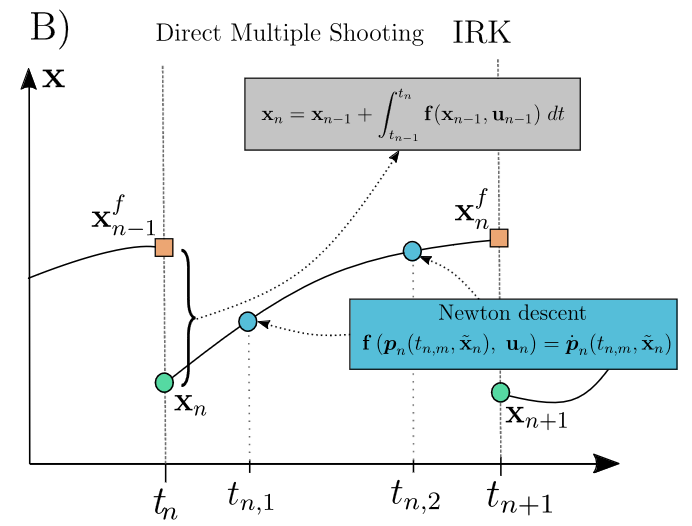
P Puchaud, F Bailly, M Begon
Computer Methods in Applied Mechanics and Engineering, 2023
Project Page /
@InProceedings{puchaud2023direct,
author = {P Puchaud and F Bailly and M Begon},
title = {Direct multiple shooting and direct collocation perform similarly in biomechanical predictive simulations},
journal = {Computer Methods in Applied Mechanics and Engineering},
year = {2023},
}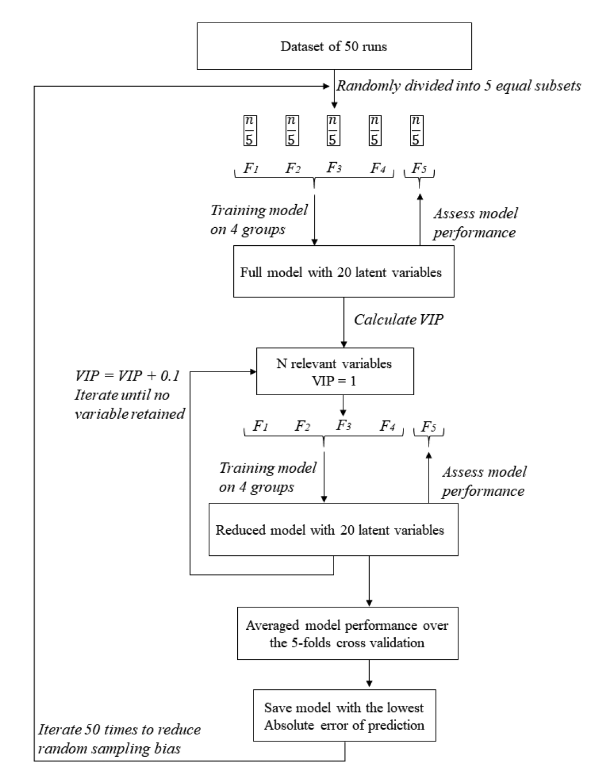
Etienne Goubault, Felipe Verdugo, Fran{\c{c}}ois Bailly, Micka{\"e}l Begon, Fabien Dal Maso
IEEE Transactions on Human-Machine Systems, 2023
Project Page /
@InProceedings{goubault2023inertial,
author = {Etienne Goubault and Felipe Verdugo and Fran{\c{c}}ois Bailly and Micka{\"e}l Begon and Fabien Dal Maso},
title = {Inertial Measurement Units and Partial Least Square Regression to Predict Perceived Exertion during Repetitive Fatiguing Piano Tasks},
journal = {IEEE Transactions on Human-Machine Systems},
year = {2023},
}
Amedeo Ceglia, Francois Bailly, Mickael Begon
IEEE Robotics and Automation Letters, 2023
Project Page /
@InProceedings{ceglia2023moving,
author = {Amedeo Ceglia and Francois Bailly and Mickael Begon},
title = {Moving Horizon Estimation of Human Kinematics and Muscle Forces},
journal = {IEEE Robotics and Automation Letters},
year = {2023},
}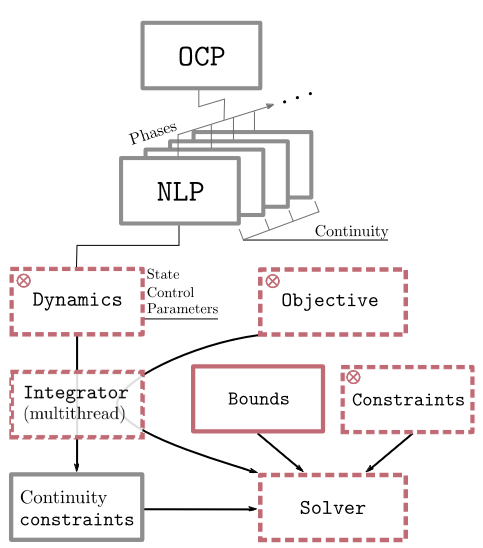
Benjamin Michaud, Fran{\c{c}}ois Bailly, Eve Charbonneau, Amedeo Ceglia, L{\'e}a Sanchez, Mickael Begon
IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2022
Project Page /
@InProceedings{michaud2022bioptim,
author = {Benjamin Michaud and Fran{\c{c}}ois Bailly and Eve Charbonneau and Amedeo Ceglia and L{\'e}a Sanchez and Mickael Begon},
title = {Bioptim, a python framework for musculoskeletal optimal control in biomechanics},
journal = {IEEE Transactions on Systems, Man, and Cybernetics: Systems},
year = {2022},
}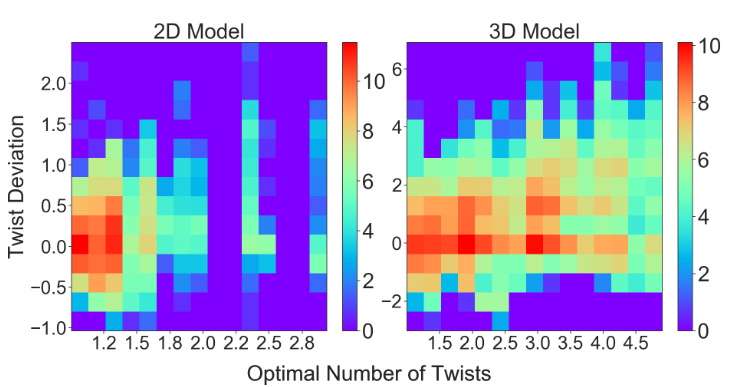
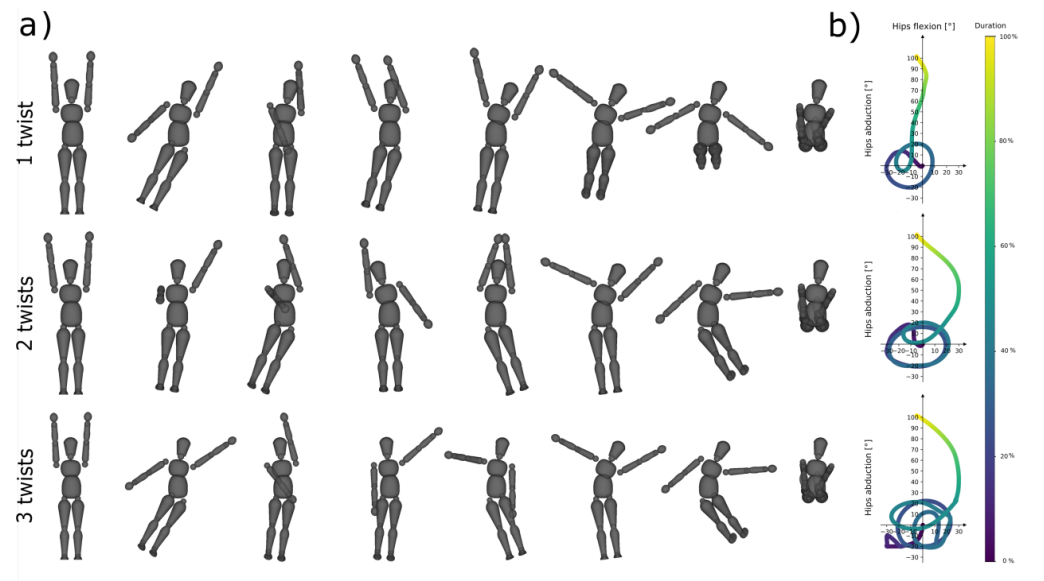
Fran{\c{c}}ois Bailly, Eve Charbonneau, Loane Dan{\`e}s, Mickael Begon
Multibody System Dynamics, 2021
Project Page /
@InProceedings{bailly2021optimal,
author = {Fran{\c{c}}ois Bailly and Eve Charbonneau and Loane Dan{\`e}s and Mickael Begon},
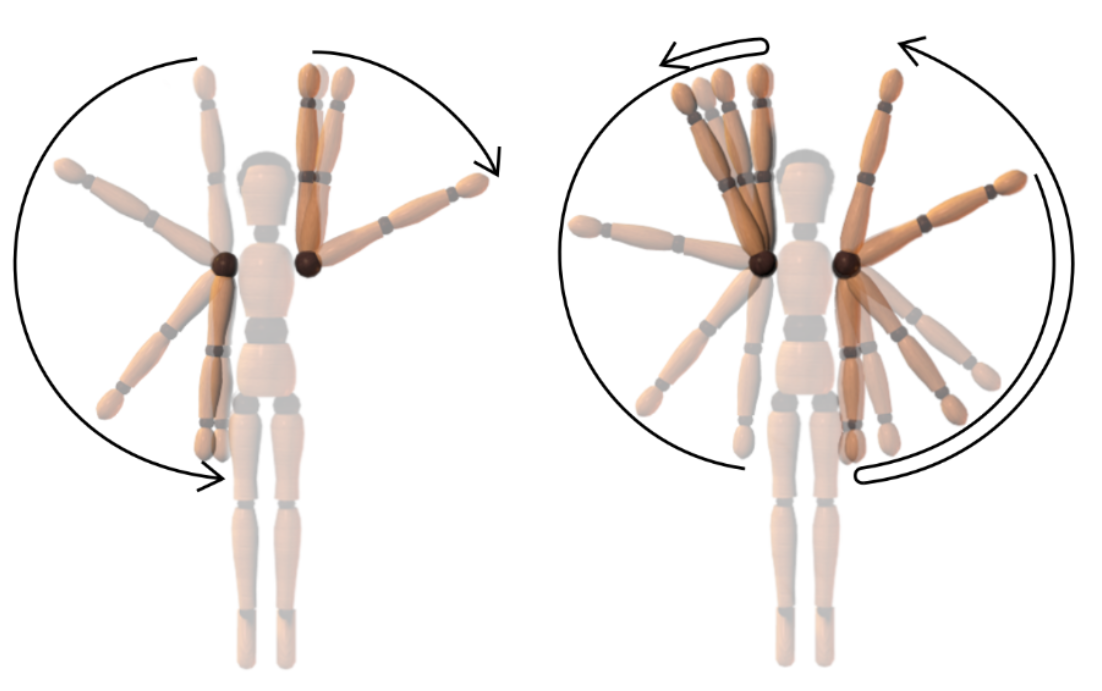
title = {Optimal 3D arm strategies for maximizing twist rotation during somersault of a rigid-body model},
journal = {Multibody System Dynamics},
year = {2021},
}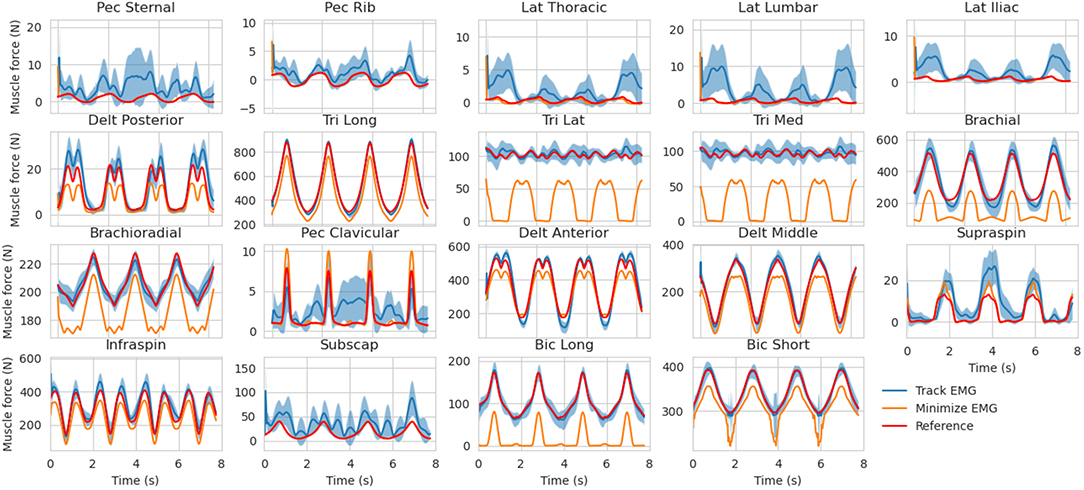
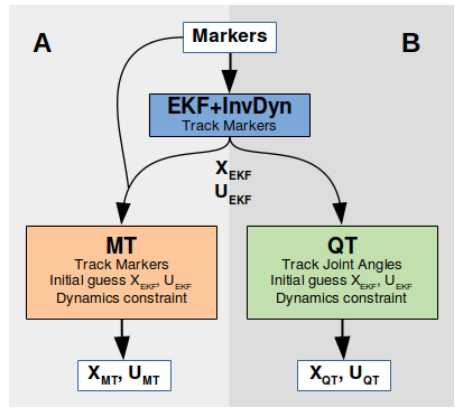
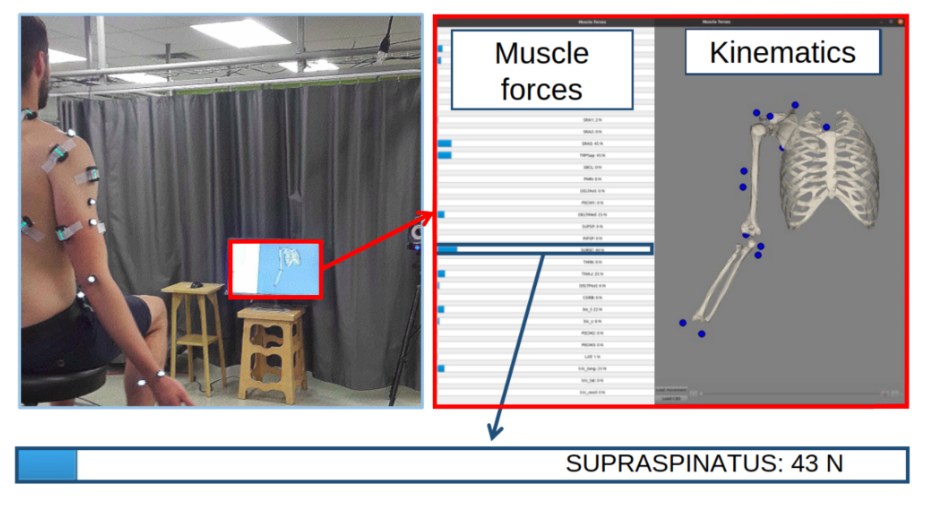
Fran{\c{c}}ois Bailly, Amedeo Ceglia, Benjamin Michaud, Dominique Rouleau, Mickael Begon
Frontiers in bioengineering and biotechnology, 2021
Project Page /
@InProceedings{bailly2021real,
author = {Fran{\c{c}}ois Bailly and Amedeo Ceglia and Benjamin Michaud and Dominique Rouleau and Mickael Begon},
title = {Real-time and dynamically consistent estimation of muscle forces using a moving horizon emg-marker tracking algorithm—application to upper limb biomechanics},
journal = {Frontiers in bioengineering and biotechnology},
year = {2021},
}
Fran{\c{c}}ois Bailly, Justin Carpentier, Philippe Sou{\`e}res
2021 IEEE International Conference on Robotics and Automation (ICRA), 2021
Project Page /
@InProceedings{bailly2021optimalICRA,
author = {Fran{\c{c}}ois Bailly and Justin Carpentier and Philippe Sou{\`e}res},
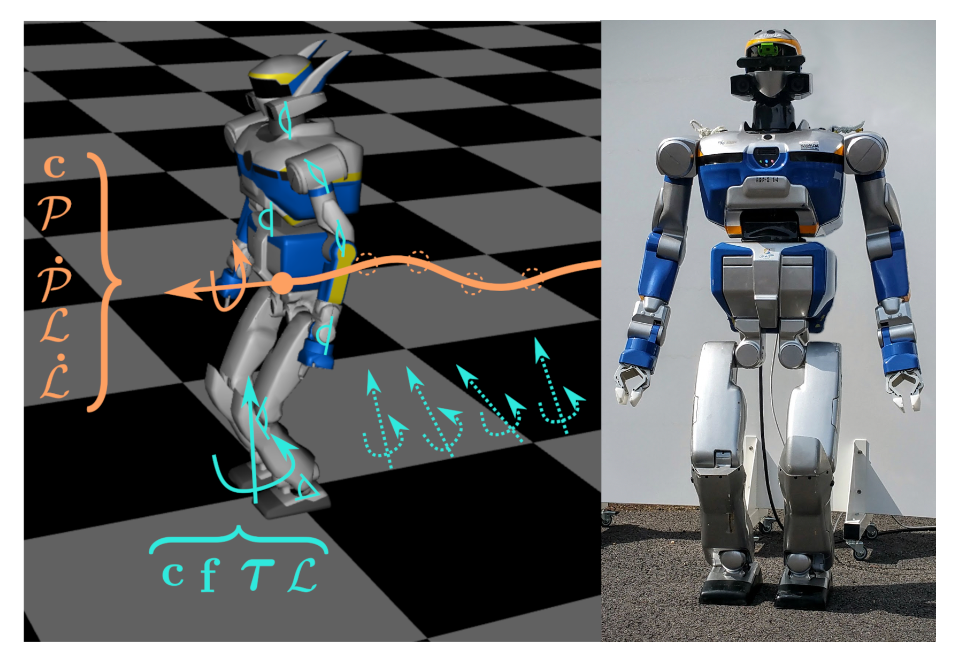
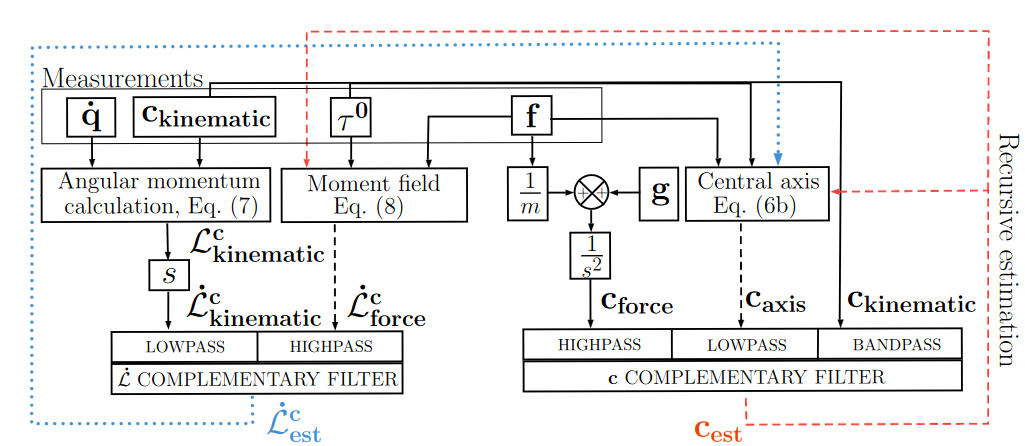
title = {Optimal estimation of the centroidal dynamics of legged robots},
booktitle = {2021 IEEE International Conference on Robotics and Automation (ICRA)},
year = {2021},
}
Fran{\c{c}}ois Bailly, Justin Carpentier, Bruno Watier, Philippe Sou{\`e}res
Computer Methods, Imaging and Visualization in Biomechanics and Biomedical Engineering: Selected Papers from the 16th International Symposium CMBBE and 4th Conference on Imaging and Visualization, August 14-16, 2019, New York City, USA, 2020
Project Page /
@InProceedings{bailly2020recursive,
author = {Fran{\c{c}}ois Bailly and Justin Carpentier and Bruno Watier and Philippe Sou{\`e}res},
title = {Recursive Filtering of Kinetic and Kinematic Data for Center of Mass and Angular Momentum Derivative Estimation},
booktitle = {Computer Methods, Imaging and Visualization in Biomechanics and Biomedical Engineering: Selected Papers from the 16th International Symposium CMBBE and 4th Conference on Imaging and Visualization, August 14-16, 2019, New York City, USA},
year = {2020},
}
Eve Charbonneau, Fran{\c{c}}ois Bailly, Loane Dan{\`e}s, Micka{\"e}l Begon
Applied Sciences, 2020
Project Page /
@InProceedings{charbonneau2020optimal,
author = {Eve Charbonneau and Fran{\c{c}}ois Bailly and Loane Dan{\`e}s and Micka{\"e}l Begon},
title = {Optimal Control as a Tool for Innovation in Aerial Twisting on a Trampoline},
journal = {Applied Sciences},
year = {2020},
}
Melya Boukheddimi, Fran{\c{c}}ois Bailly, Philippe Sou{\`e}res, Bruno Watier
Computer Methods in Biomechanics and Biomedical Engineering, 2019
Project Page /
@InProceedings{boukheddimi2019human,
author = {Melya Boukheddimi and Fran{\c{c}}ois Bailly and Philippe Sou{\`e}res and Bruno Watier},
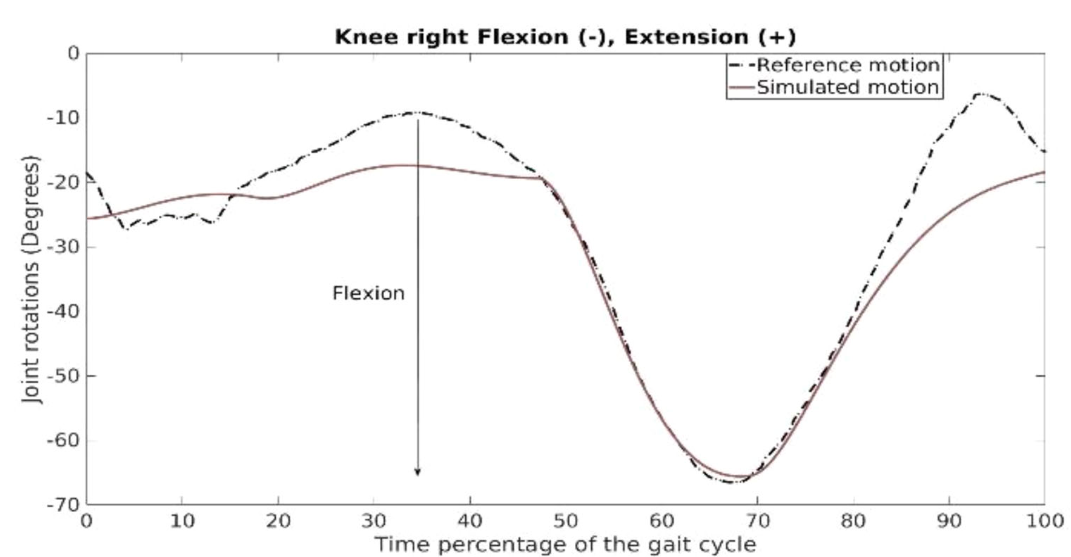
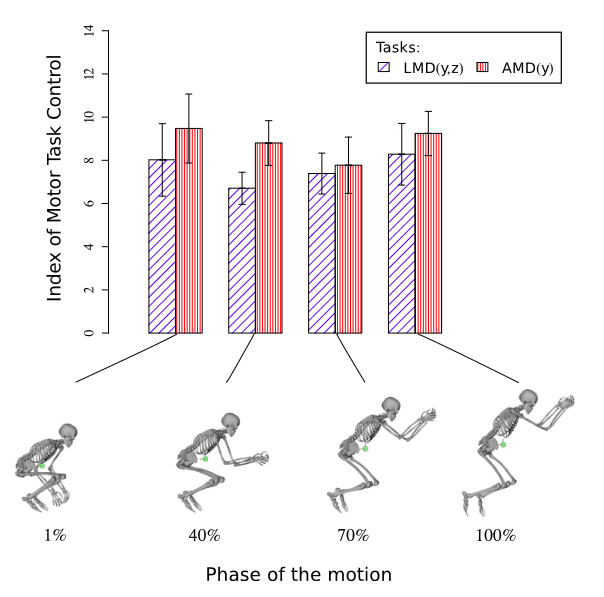
title = {Human gait simulation from a reduced set of low-dimensional tasks using hierarchical control},
journal = {Computer Methods in Biomechanics and Biomedical Engineering},
year = {2019},
}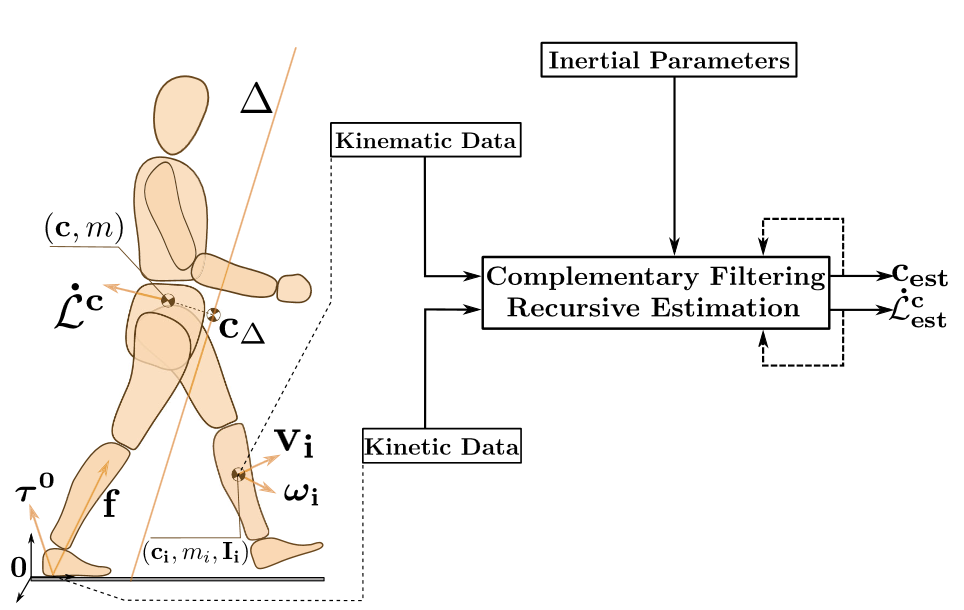
Fran{\c{c}}ois Bailly, Justin Carpentier, Mehdi Benallegue, Bruno Watier, Philippe Sou{\`e}res
IEEE Robotics and Automation Letters, 2019
Project Page /
@InProceedings{bailly2019estimating,
author = {Fran{\c{c}}ois Bailly and Justin Carpentier and Mehdi Benallegue and Bruno Watier and Philippe Sou{\`e}res},
title = {Estimating the center of mass and the angular momentum derivative for legged locomotion—a recursive approach},
journal = {IEEE Robotics and Automation Letters},
year = {2019},
}
G Maldonado, F Bailly, P Sou{\`e}res, B Watier
Computer Methods in Biomechanics and Biomedical Engineering, 2019
Project Page /
@InProceedings{maldonado2019inverse,
author = {G Maldonado and F Bailly and P Sou{\`e}res and B Watier},
title = {Inverse dynamics study of the parkour kong-vault during take-off},
journal = {Computer Methods in Biomechanics and Biomedical Engineering},
year = {2019},
}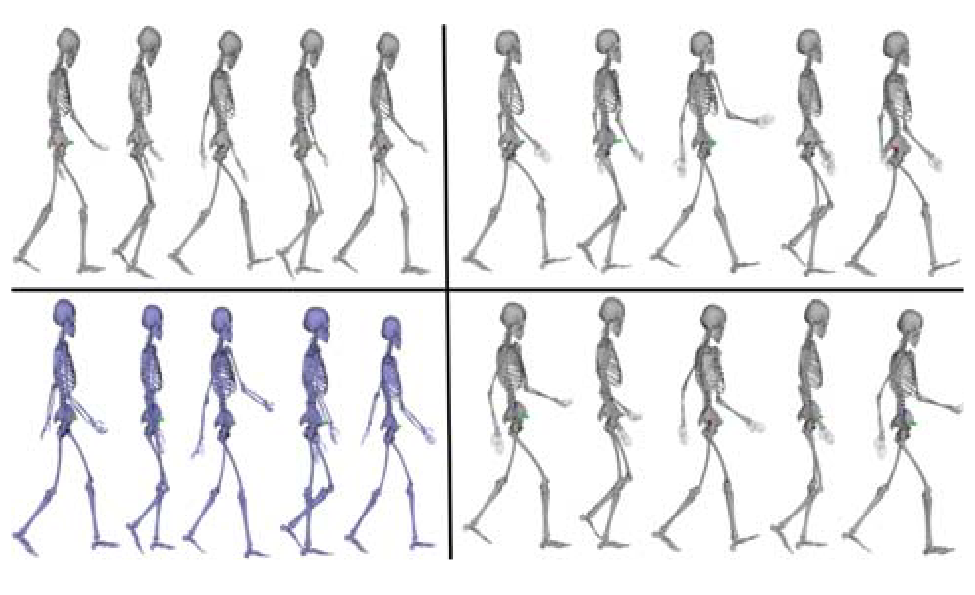
Melya Boukheddimi, Fran{\c{c}}ois Bailly, Philippe Sou{\`e}res, Bruno Watier
2019 IEEE International Conference on Robotics and Biomimetics (ROBIO), 2019
Project Page /
@InProceedings{boukheddimi2019human2,
author = {Melya Boukheddimi and Fran{\c{c}}ois Bailly and Philippe Sou{\`e}res and Bruno Watier},
title = {Human-like gait generation from a reduced set of tasks using the hierarchical control framework from robotics},
booktitle = {2019 IEEE International Conference on Robotics and Biomimetics (ROBIO)},
year = {2019},
}
Fran{\c{c}}ois Bailly, Emmanuelle Pouydebat, Vincent Bels, Bruno Watier, Philippe Sou{\`e}res
7th Conference on Biomimetic and Biohybrid Systems, 2018
Project Page /
@InProceedings{bailly2018should,
author = {Fran{\c{c}}ois Bailly and Emmanuelle Pouydebat and Vincent Bels and Bruno Watier and Philippe Sou{\`e}res},
title = {Should mobile robots have a head ? -A rationale based on behavior, automatic control and signal processing-},
booktitle = {7th Conference on Biomimetic and Biohybrid Systems},
year = {2018},
}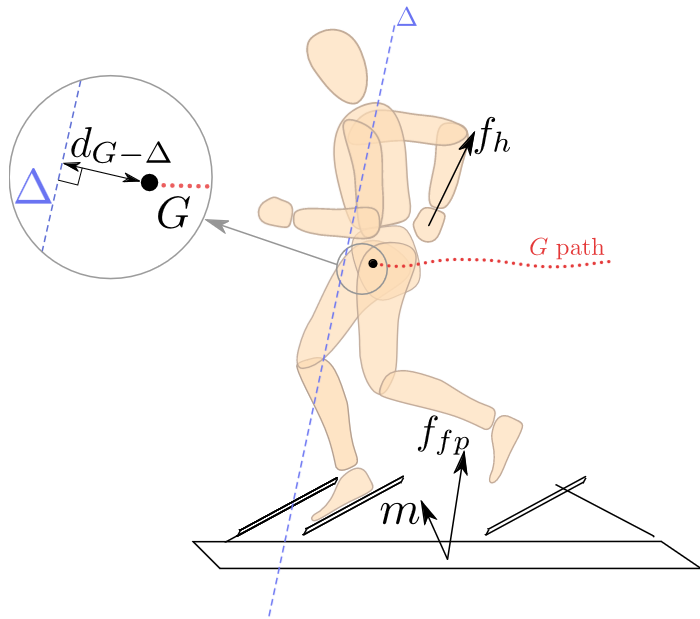
Fran{\c{c}}ois Bailly, Justin Carpentier, Bertrand Pinet, Philippe Sou{\`e}res, Bruno Watier
7th IEEE International Conference on Biomedical Robotics and Biomechatronics (BioRob), 2018
Project Page /
@InProceedings{bailly2018mechanical,
author = {Fran{\c{c}}ois Bailly and Justin Carpentier and Bertrand Pinet and Philippe Sou{\`e}res and Bruno Watier},
title = {A mechanical descriptor of human locomotion and its application to multi-contact walking in humanoids},
booktitle = {7th IEEE International Conference on Biomedical Robotics and Biomechatronics (BioRob)},
year = {2018},
}
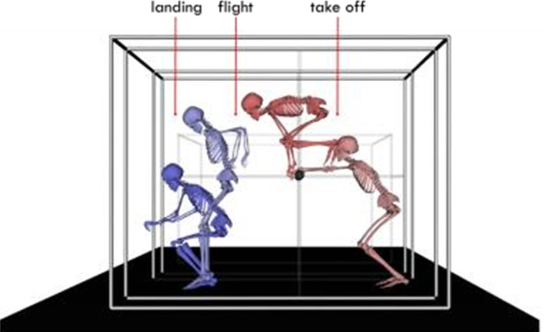
Galo Maldonado, Fran{\c{c}}ois Bailly, Philippe Sou{\`e}res, Bruno Watier
Scientific Reports, 2018
Project Page /
@InProceedings{maldonado2018coordination,
author = {Galo Maldonado and Fran{\c{c}}ois Bailly and Philippe Sou{\`e}res and Bruno Watier},
title = {On the coordination of highly dynamic human movements: an extension of the Uncontrolled Manifold approach applied to precision jump in parkour},
journal = {Scientific Reports},
year = {2018},
}
Fran{\c{c}}ois Bailly
PhD Thesis, 2018
Project Page /
@InProceedings{bailly2018descriptive,
author = {Fran{\c{c}}ois Bailly},
title = {Descriptive and explanatory tools for human movement and state estimation in humanoid robotics},
booktitle = {PhD Thesis},
year = {2018},
}
Galo Maldonado, Francois Bailly, Philippe Soueres, Bruno Watier
Computer methods in biomechanics and biomedical engineering, 2017
Project Page /
@InProceedings{maldonado2017angular,
author = {Galo Maldonado and Francois Bailly and Philippe Soueres and Bruno Watier},
title = {Angular momentum regulation strategies for highly dynamic landing in Parkour},
journal = {Computer methods in biomechanics and biomedical engineering},
year = {2017},
}
Fran{\c{c}}ois Bailly, Sylvain Guilley, Annelie Heuser, Olivier Rioul
16th Workshop on Cryptographic Hardware and Embedded Systems (CHES 2014), 2014
Project Page /
@InProceedings{bailly2014optimality,
author = {Fran{\c{c}}ois Bailly and Sylvain Guilley and Annelie Heuser and Olivier Rioul},
title = {On optimality of MIA for unknown leakage models and related new practical results},
booktitle = {16th Workshop on Cryptographic Hardware and Embedded Systems (CHES 2014)},
year = {2014},
}Talks
CMBBE 2023 Paris, France, 2023

47éme congres de la Société de Biomécanique 2022, Monastir, Tunisia, 2022
CMBBE 2021 - Bonn, Germany, 2021
IEEE ICRA 2021 - Xi'an, China, 2021

21st Biennal Meeting of the Canadian Society for Biomechanics - Montréal, Canada, 2021
21st Biennal Meeting of the Canadian Society for Biomechanics - Montréal, Canada, 2021

IEEE IROS 2019 - Macau, China, 2019
CMBBE 16th International Symposium 2019 - New-York City, USA, 2019

PhD thesis defense - LAAS-CNRS, Toulouse, France, 2018

IEEE BIOROB 7th International Conference 2018 - University of Twente, The Netherlands, 2018

Living Mahchines 2018 - Paris, France, 2018

JNRH 2017 - LIRMM Montpellier, France, 2017
Homepage Template
Feel free to use this website as a template! It is fully responsive and very easy to use and maintain as it uses a python script that crawls your bib files to automatically add the papers and talks. Checkout the github repository for instructions on how to use it.